Congresos
finDER Robot de búsqueda en ambientes de desastre

Profesor:
Minami Koyama, Yukihiro
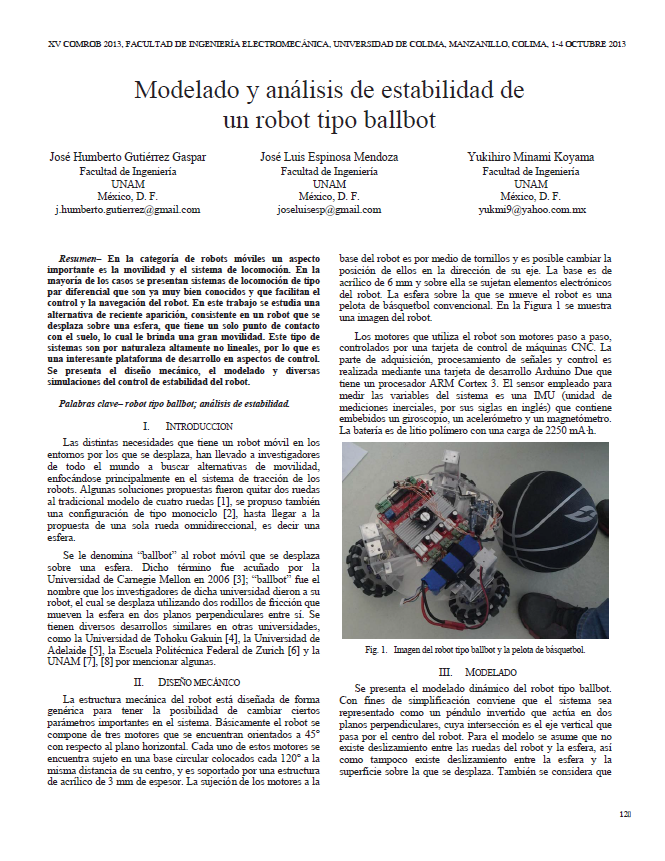
Modelado y análisis de estabilidad de un robot tipo ballbot
Alumno:
Gutiérrez Gaspar José Humberto
Diseño de sistemas mecánicos para robot de búsqueda y rescate

Alumno:
Ramos Vasquez Gerardo
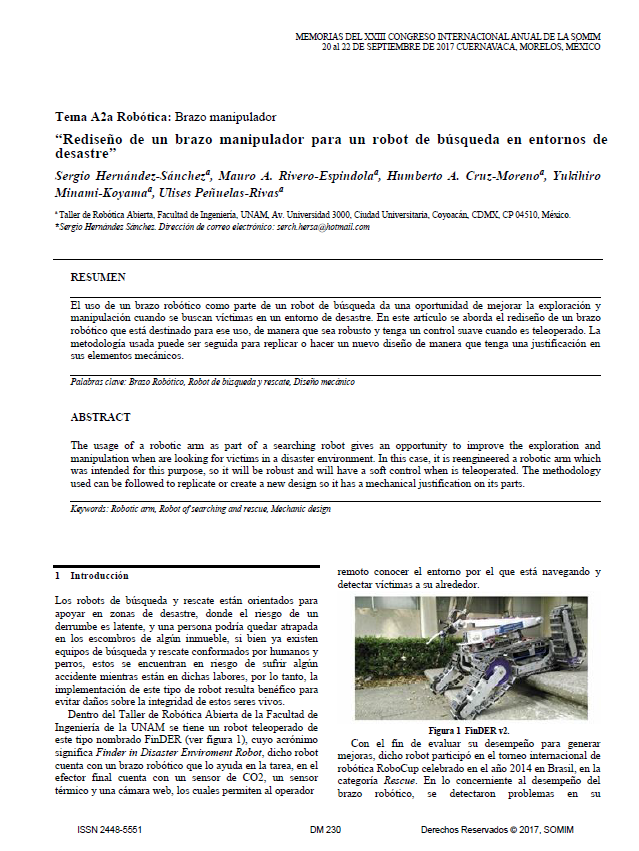
Rediseño de un brazo manipulador para un robot de búsqueda en entornos de desastre
Alumno:
Hernández Sánchez Sergio
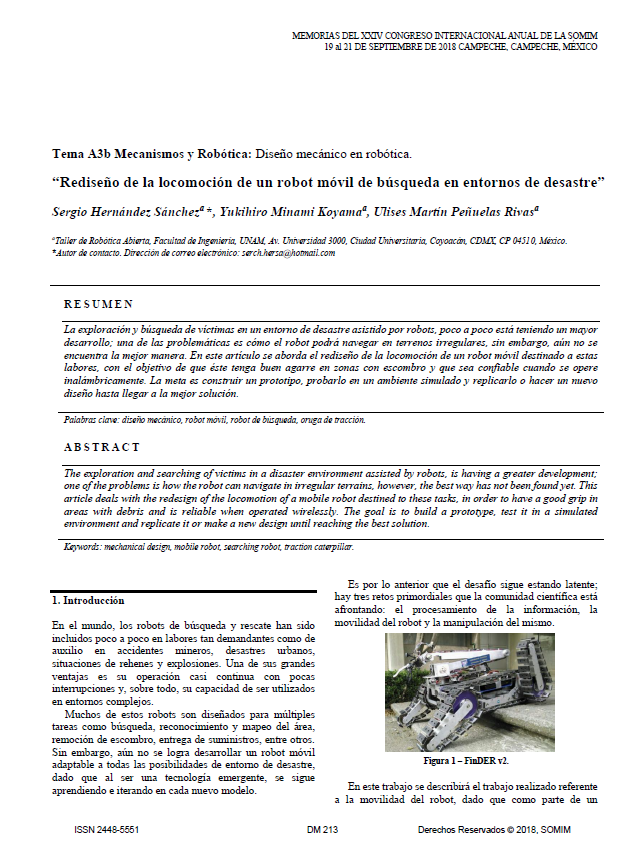
Rediseño de la locomoción de un robot móvil de búsqueda en entornos de desastre
Alumno:
Mauro A. Rivero-Espindola
Diseño de un robot serpiente con articulaciones y ruedas actuadas

Alumno:
Pineda Leonardo César